
簡単な移動機構で使われているステッピングモータですが、そんな使用頻度の多いステッピングモータについて実用的な解説をしていきたいと思います。ステッピングモータを使う前に知っておきたい予備知識や事例をもとに具体的な選定計算の方法について解説したいと思います。
[toc]
ステッピングモータとは
ステッピングモータとは、細かく、正確な位置決め運転を簡単に実現できるモータです。ステッピングモーターは時計の秒針のように、一定角度ずつ回転します。この角度を基本ステップ角度と言い、5相ステッピングモーターの場合、基本ステップ角度は0.72°です。
例えば、1パルスあたり0.72°動くのであれば、90°動かすためには125パルスの信号を入力します。
ステッピングモータはパルス信号で速度を簡単に制御でき、オープンループで制御できることが特徴です。モータへの負荷が大きくなり、脱調するケースがあります。そういったケースを防ぎたい場合は、別途エンコーダーを設けるか、エンコーダ付きのモータにする必要があります。頻繁な起動・停止に向いており、停止時に保持力が発生するため、機械的なブレーキが必要ありません。※ただし、停電すると保持力は無くなります。
以上がステッピングモータの簡単な説明です。次に、ステッピングモータの用途について解説します。
ステッピングモータの用途
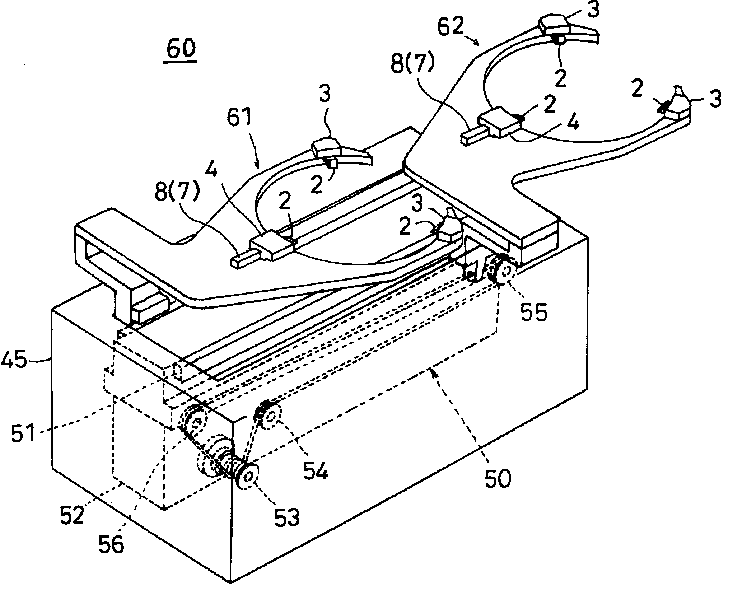
用途についてですが、モータの種類や位置決め精度やトルク特性も様々なので一概に用途を紹介することはできませんが、代表的な使い方として、”ベルト・プーリ機構”で使われる場面が多いと思います。搬送運動や往復を繰り返すような動きには、よく使われると思います。
私の場合、単純に一方向に回すだけであればインダクションモータを使いますが、精度のいらない(±0.5mm程度)決められた位置へ停止させたい時などはステッピングを使います。ベルト・プーリ機構のように剛性が低い機構は負荷慣性モーメントが不安定になりやすい為、応答性を上げるようなゲイン調整が難しいので、サーボなどは逆に不向きなのです。
そういった視点で、ステッピングモータの用途事例を紹介します。
・プリンターのヘッド移動機構(インク交換)

・レンズ制御機構(明るさを調整)
・エアコンのルーバー移動機構(風向き調整)

・スロットのリール回転機構(777)
・インデックステーブル機構
・搬送系アーム駆動機構
・スキャナーの画像スキャン機構
・搬送コンベヤ機構

機械屋であれば、「あー、見たことある」と頷いてもらえる事例だと思います。高精度というよりも、だいたいの位置決め精度が必要な場面で使われるといったイメージがわかって頂けたでしょうか。
それでは、次にステッピングモータの種類についてご紹介していきます。
ステッピングモータの種類
メーカによって種類や商品ラインナップは異なりますので、ここではオリエンタルモータのラインナップを例に紹介したいと思います。大抵、モータカタログを見るときは使用目的がはっきりしているので、ラインナップが頭に入っておられる方も多いと思います。ですが、私の場合、いちいちラインナップを覚える気力がないので、その場面になってカタログを見直すスタイルを取っています。では、何からスタートするのかというと以下の手順で選定をしています。
まずは”モータの大きさ”ですね。物理的に構想の中に入るモータサイズを決めます。ステッピングモーターの場合、以下の大きさに大別されています。
≪外形の大きさ(取付角)≫
□20
□28
□35
□42
□50
□56.4
□60
□85
さらに、取付角以外にも、「薄型タイプ」といった奥行の薄いものもありますので併せて見ます。まずはこのサイズの中から、構想に適した大きさをざっくり選びます。
次にタイプですね。タイプとは目的に適したタイプを選びます。以下のようなタイプに分かれています。
≪タイプ別≫
・高トルクタイプ
・高分解能タイプ
・標準タイプ
・ギヤードタイプ
・ハーモニックギヤードタイプ
ステッピングを選ぶ時点で精度を要求することは矛盾するようですが、精度が厳しい条件をクリアしないといけない場合もあります。そんな時は、標準ではなく高分解能タイプを選ぶことができます。また、精度もそこそこ必要でトルクも必要な場合もあります。そんな時は、ハーモニックギヤードタイプを選ぶことができます。
ここまで見ると、ある程度条件が絞られてきますので、ここから本格的に選定計算を行い、細かな条件を確かめていきます。選定計算をする場合は、細かな条件を決めていき確認していくわけですが、まずは要求仕様を決めて、計算に取り組みます。
このあと選定計算を具体的に行いますが、その前にステッピングモータのトルク線図の見方をおさらいしておきましょう。
ステッピングモータのトルク線図の見方
ここで、押さえておきたいポイントについて解説します。
■励磁最大静止トルク(TH)
通電状態で停止しているときに発生できる、最大の自己保持力です。
■プルアウトトルク
それぞれの回転速度で運転可能な最大トルクです。
モーターを選定する場合、必要なトルクがこの曲線の内側に入っていなければなりません。
■最大自起動周波数(fs)
無負荷状態で瞬時に起動停止できる最大のパルス速度です。
■自起動運転パターン
加速・減速時間を設けることなく、瞬時に起動停止させる運転です。
■加減速運転パターン
加速・減速時間を設け、パルス速度を徐々に上げる(下げる)運転です。
この運転は最大自起動周波数よりも高速側(スルー領域)まで使用可能です。
この用語の意味を理解しておかないと、選定を行うときにグラフを読み取ることができません。しっかり理解しておきましょう。
それでは、具体的な要求仕様と選定計算について解説していきます。
ステッピングモータの選定計算
選定計算の方法ですが、各メーカのカタログに選定手順が書かれていますので、メーカごとに確認しておいてください。基本的に計算する部分は同じですが、メーカごとに若干ですが計算手順や計算する内容が異なっています。また、世の中には選定ソフトがありますが、一度自分の手で計算をしたほうが良いです。その後、確認する意味でソフトを使うことをお勧めします。
はじめから選定ソフトに頼ってしまうと応用が効かなくなりますし、構想モデルによってはソフトに当てはまらない場面が出てきます。なので、はじめは調べたり、悩んだり時間が多少かかったとしても、手計算で自分の頭で理解しながら計算してみましょう。
それでは、過去に私が計算したことのある計算例を紹介します。このときは多摩川精機製のステッピングを選定しました。なぜ、多摩川精機製を選定したのかも最後に理由を書いています。
《手順》
1.概略図と概略仕様のまとめ
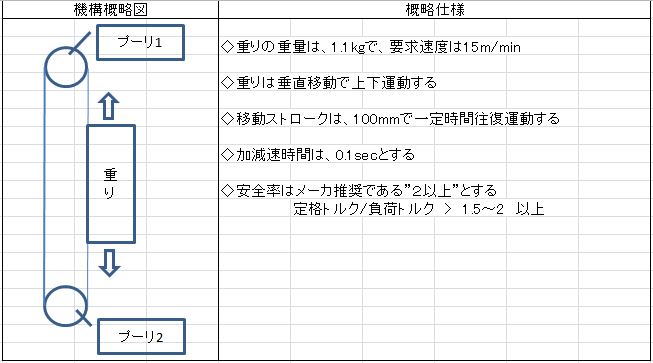
構想としては、プーリとベルト機構を使った上下運動を往復する機構です。重りと書かれた部分に部品を取り付けて、100mmストロークを最大15m/minで動かす仕様となっています。等速領域を確保するために、加減速は0.1secとしています。
2.使用条件まとめ
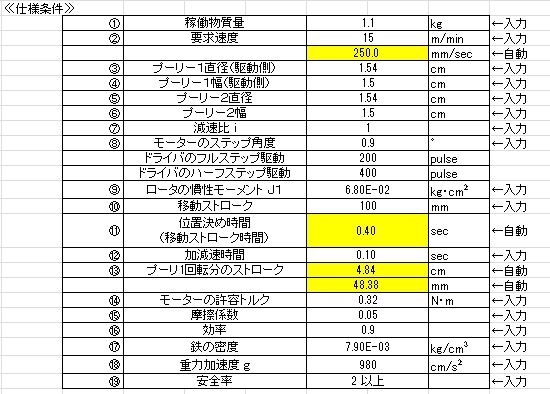
計算に必要となる項目をカタログを参照しながら、埋めていく作業です。こういった項目は、これから何度も出てきますので、一度エクセルなどでまとめておくと、次からの計算に役立ち、時間短縮になります。
3.駆動機構の負荷トルクの決定
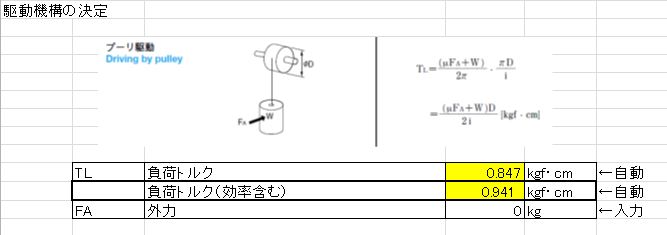
駆動機構による負荷トルクを計算します。構想モデルによって当てはめる計算式が違ってきますので、自分のケースに当てはめて計算してください。
4.加速トルクの計算
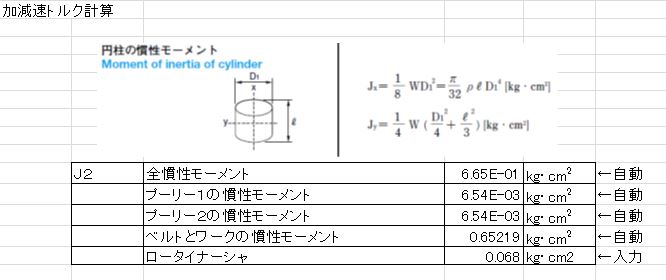
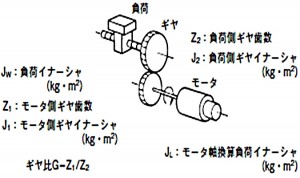
これはステッピングに関わらず、どんなモータ選定でも必要となるステップです。イナーシャ計算については過去の記事で詳しく解説していますので、わからない方はそちらを参考にしてください。
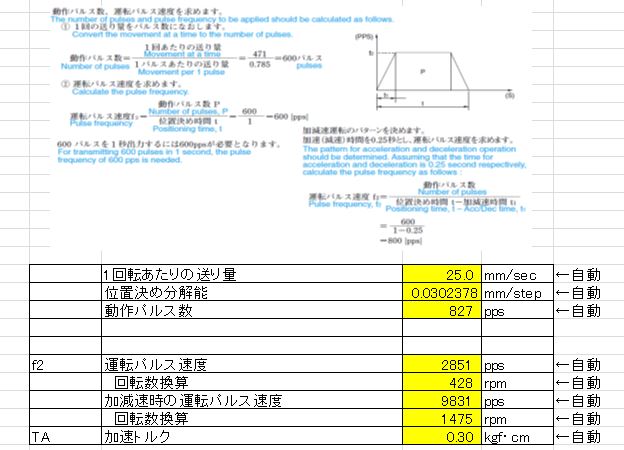
今回も必要なイナーシャを計算で求めています。サーボ選定と違うのは、このあと運転パルス速度を求めて加速トルクを算出するといった手順になることです。これも一度慣れてしまえば、理解できると思います。
5.必要運転トルク(機構の負荷トルク+加速トルクx安全率)の計算

加速トルクが計算で求まれば、あとは機構の負荷トルクと足しあわせてれば終わりです。私の計算では、そこに安全率2倍を掛けています。大体メーカ保証として、安全率1.5~2倍を推奨していますので、安全を見て2倍としておけば問題ないでしょう。
6.運転パルス速度領域でのトルクと比較確認
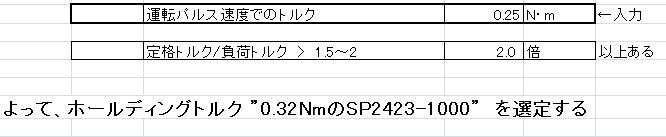
最後に、運転パルス速度領域でどのくらいのトルクが出るのかを確認します。今回の例では、0.25Nmですので、必要運転トルクがこのトルク以下であれば、問題ないという判断になります。
以上がステッピングモータの選定計算の事例となります。
※この計算は過去に計算したことのある事例を紹介しましたが、この計算結果を流用した場合のいかなるトラブルについては保証致しかねますので、ご了承ください。
ステッピングモータのメーカ選び
オリエンタルモータ
[公式サイト:https://www.orientalmotor.co.jp/]
日本電産サーボ
[公式サイト:http://www.nidec-servo.com/jp/]
多摩川精機
[公式サイト:http://www.tamagawa-seiki.co.jp/jpn/]
山洋電気
[公式サイト:http://www.sanyodenki.co.jp/]
ミスミ
[公式サイト:http://jp.misumi-ec.com/]
ミネベア
[公式サイト:http://www.minebea.co.jp/]
今回ご紹介した事例では、短納期でエンコーダーとセット購入を考えて、多摩川精機を選びました。ステッピングモータの場合、脱調とよばれる現象が発生し、場合によってはモータ自身が自分の位置を見失う症状が起きてしまいます。
そのため、別途エンコーダーを使って位置を管理するようにしました。モータ選定で購入するメーカを決めるには、いろんな要素が絡んでくるため、十分な検討が必要です。その話はまた別の機会に話したいと思います。
ただ、こういった計算が終われば、条件がはっきりしますので、あとは相見積もりを複数のメーカから取りながら、じっくり選ぶことができます。新規で設計する場合にも、こういった実績をしっかり自分の中で積み上げれば、自信にもつながりますので、この機会にぜひ計算してみて下さい。
最後までお付き合い頂き、ありがとうございました。




コメント