モータ選定と言えば、いったいどんなことを調べて、どんな計算を行えば良いのか迷ってしまうと思います。さらには、得られた計算結果に対してどういう判断で合否を行うのかわからない方もいると思います。ここでは、モータ選定で”押さえておきたいポイント”ついてご紹介したいと思います。モータ選定の流れを理解できれば、基本を抑えることができますので、あとはすべてのケースで応用が効くかと思います。
[toc]
モータ選定で考えるべき項目とは?
何でもそうですが、”仕様書”は設計には必要不可欠なものです。
どういった重さの物を、どのくらいのスピードで動かしたいのか。また、どんなサイクルで動かしたいのかなどを明確にします。回転体であれば、重さや径、イナーシャ、回転数や位置決め頻度などを詳しく決めていきます。
例えばこんな感じです。機械諸元という名目で作ります。
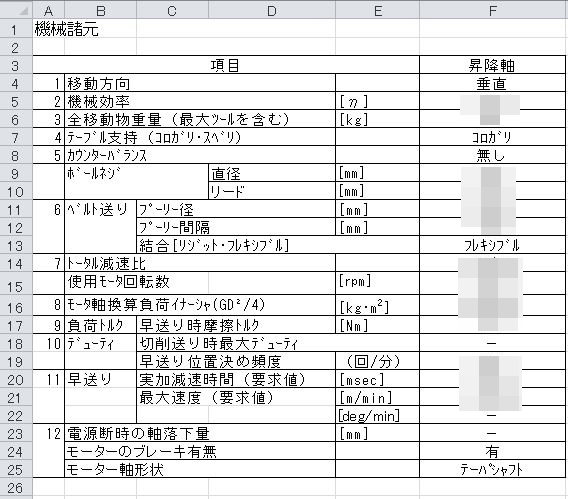
これは、ボールねじを使った駆動方式の場合の例です。駆動方式によって中身は変わります。
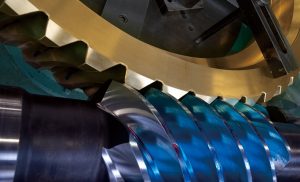
次に”装置の駆動方法”を具体的に決める必要があります。具体的にとは、どんな駆動方式を選ぶのかということを決めます。
ウォームなのか、プーリなのか、平歯車なのかDDモータなのか・・・
実際にものの大きさを決めて、スペース的に入るのか、
ボールねじを使って、モータと直結させるのか、
プーリやギヤで減速させるのか、
その時のプーリ比やギヤ比はいくつなのか、を決めます。
素材として手に入るものなのか、周りの環境から影響を受けて問題ないかなどを大まかな感じで構いませんので目処を立てておきます。ただし、減速比は具体的に決める必要があります。減速比は、モータ選定において必要なトルクを決める重要な要素となるからです。
概略構想の段階での減速比は、機械スペースや動かしたい速度から決めていきます。
とはいっても、トルク計算をしたあとで変更が必要な場合も多々ありますので、確定ではありません。
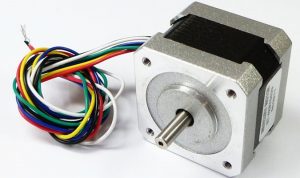
次に、使いたい”モータ決め”に移ります。
大きさや容量、スペースの問題など、装置仕様によって使われるモータが変わってきますので、十分な検討が必要です。もし、過去に実績があれば、そちらを参考にすると良いでしょう。その会社における過去の実績があれば、失敗する可能性が断然減りますからね。
主なモータの種類はこちらです。
![]() DCモータ
DCモータ
![]() ブラシレスモータ
ブラシレスモータ
![]() インダクションモータ
インダクションモータ
![]() リバーシブルモータ
リバーシブルモータ
![]() ギヤードモータ
ギヤードモータ
![]() サーボモータ
サーボモータ
![]() DDモータ
DDモータ
他にもたくさん種類があると思います。私がよく使うモータを例に挙げただけですので。それぞれ用途があり、目的に応じたモータを選んでください。
例えば、精密な位置決めが必要であればサーボモータを選択しますし、サーボまでは使わなくても自前のポテンショを使って回転させたいのであれば、インダクションモータを選択するとか、ギヤードモータを使うとか、容量は小さくてレスポンス性の高い動きをさせたいのであれば、DCモータを使うといった感じです。
注意点としては、モータの動きと位置決め精度、稼働状態ですね。これも過去の実績と照らし合わせながら選定すると良いと思います。
サーボモータでよく使うメーカをご紹介します。選定などの技術資料も豊富にありますので、参考にして下さい。
![]() ACサーボモータメーカ一覧
ACサーボモータメーカ一覧
・YASKAWA
・FANUC
・山洋電気
・オリエンタルモータ など
はっきり言って、サーボモータ選びは、精度とコストから選ぶような傾向になっています。飛び抜けて位置決め精度を求めない限り、国内メーカーであればさほど差がありません。また、電気的な要素も含め、初期設定が簡単だとか、プログラムが楽だとかはあると思いますが、精度が必要でない場合は、コスト比較で決めてしまうでしょう。
しかし、運が悪いと、失敗事例もあります。以前、私も中国仕様の機械を設計する際に、精度が必要のない機械だったので、安川電機のJUNMAシリーズという格安のモータを選定したことがあります。
サーボモータとしては、格段に値段がやすかったのですが、廃盤になってしまい、別のものを選定し直した経験があります。
最初の選定の段階で、こういった廃盤の可能性は調べたほうが良いでしょう。
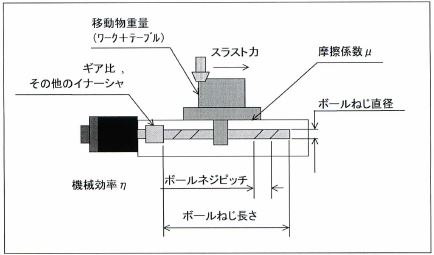
話を元に戻しますが、過去の実績がなく、全く新規で設計する場合は、自分でトルク計算をする必要があります。トルク計算には、主に次の要素を明確にして諸条件を計算してください。
【機械条件】
・モータ締結構成(直結なのか、ベルトなのか、チェーンなのか、ギヤなのか)
・移動方向(水平か、垂直か)
・移動物重量
・各移動体の大きさ、ギヤ比、重さ、イナーシャ
・摩擦係数
・機械効率 など
【動作要求条件】
・希望位置決め頻度(1分間に何回動かすのか、加速、等速、減速頻度)
・早送り速度
・移動距離
・必要となる加速時間、減速時間 など
【仮選定したモータ仕様】
・モータイナーシャ
・定格トルク
・最大トルク
・最高回転数 など
これらの諸条件をもとに、モータ軸換算イナーシャを計算し、
モータ仕様と照らし合わせます。
【モータ軸換算イナーシャ計算】
・ピッチ
・移動物のイナーシャ
・伝達部のイナーシャ
・その他イナーシャ
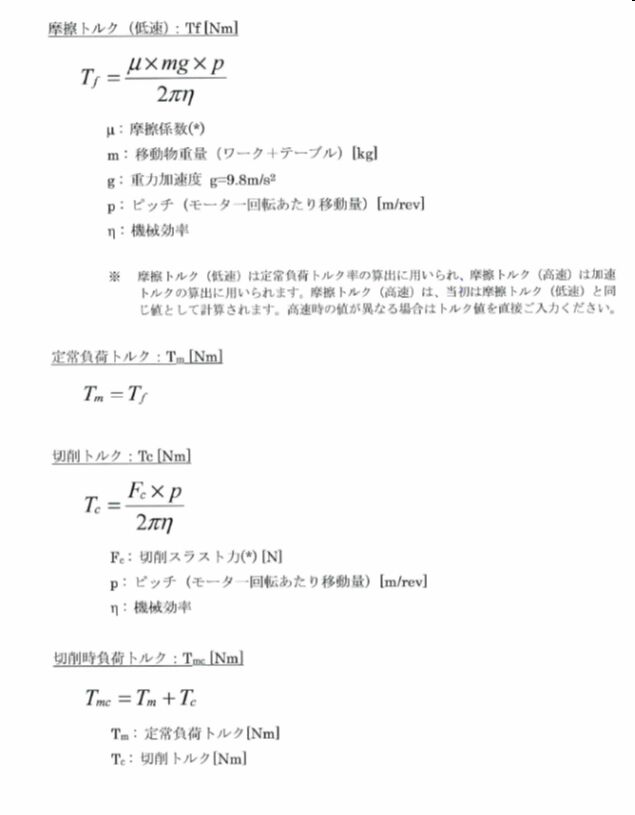
・負荷イナーシャ(摩擦トルク)
・定常負荷トルク
・搬送物重量(構造体重量とは別) など
最終的には、動かしたい移動体のイナーシャを選定したモータトルクで動かせるのか、特に、垂直方向で動かす場合に注意が必要で加速、減速時にモータトルクが足りているのかを確認するわけです。
この最終確認は、
サーボモータを使う場合
DDモータを使う場合
インダクションモータを使う場合
DCモータを使う場合
・・・ など
各モータによってチェックすべき項目が違ってきますので、よくよくモータ知識を勉強しないといけないというわけです。
移動体の”イナーシャ”計算
イナーシャとは、物体の慣性モーメントであり、物体の回転しやすさとか、回転しにくさというイメージです。例えば、ビニール傘と金属の傘とでは、回転しやすさが違いますよね。
感覚的にわかると思いますが、ビニール傘を手で回そうとすると、軽くて回しやすいですが、金属の傘だと重さがあるので、回しづらく、また止まりにくいですよね。これが物体の慣性(イナーシャ)となります。
物体のイナーシャ計算では、物体の形状によって計算式が異なります。
![]() 円柱の場合(中空)
円柱の場合(中空)

![]() 円柱の場合(円筒)
円柱の場合(円筒)

![]() 直方体の場合
直方体の場合

![]() 円錐の場合
円錐の場合

3D-CADを使っていれば、計算しなくても簡単に算出することができますが、2Dの場合ですと、自分で計算する必要がありますので、上記式より、計算してみてください。
複雑な形状の場合は、簡単な形状に置き換えた”簡易計算”でいいと思います。無垢(むく)の形状で簡易計算すれば、実際にはそれ以上のイナーシャにはなりません。
モータ軸換算イナーシャ計算に必要な計算式
モータ軸換算とは、直線軸を回転軸に換算したり、装置全体の構成すべてをモータ軸のイナーシャとして置き換えたときの値を意味します。
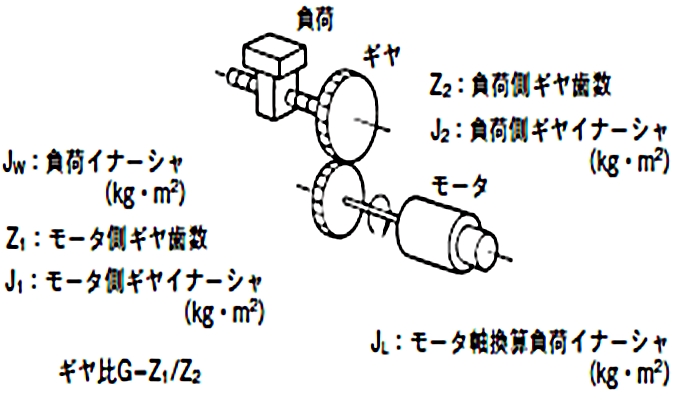
例えば、モータからギヤを使いチェーンで連結し、連結先に各ネジを使ってナットを直線の動きに変換する場合は、ギヤのイナーシャ、ギヤ比、角ネジのイナーシャやナットのイナーシャなどすべてをモータ軸に換算する必要があります。
モータ軸換算のイナーシャ計算は計算式が様々ありますので、駆動方法に応じて適切な計算式を使って求めるようにして下さい。ここでは、私がよく使っている計算式(参考例)をご紹介します。
ボールねじ+水平

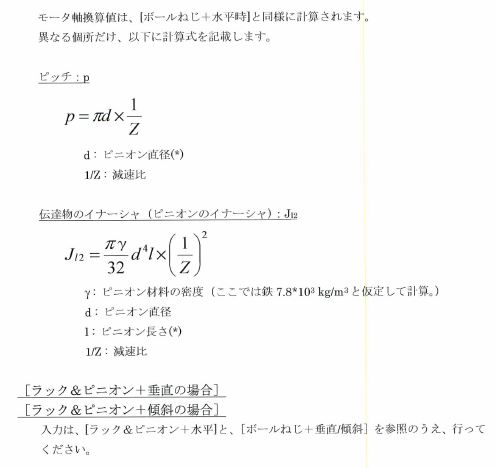
ラック&ピニオン+水平
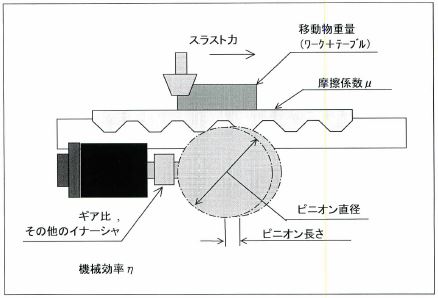
※参考資料(FAUNUサーボモータ選定資料より)
モータ軸換算イナーシャを求めるときには、駆動方式によって計算式が異なってきますので、部品構成に応じて適切な計算式を使ってください。
以上、モータ選定についておおまかな流れとイナーシャ計算についてですが、おそらく理解できない部分が多々あったと思います。一度理解してしまえば、あまり苦ではないのですが、そのひと山を越えることがとても辛かったりします。
そのためにも、一通りモータについて知識を入れておくととても理解度が早くなりますので、もし、モータ技術について詳しく知りたいと思われた方は、こちらの本を読んでみてはどうでしょうか?

![]()
私もいつでも手に取れる場所に置いている本ですが、初心者でもわかりやすく図解入りで解説されているので、基本原理、構造、制御が理解しやすくなると思います。
ご参考までに。




コメント